
零基础学习地平线 征程6 QAT 量化感知训练
针对只使用过 Pytorch 在服务器上训练过一些分类、检测模型,没接触过 QAT 的小白,又不想读 PyTorch 官方文档,只想简单入个门,怎么办嘞?欢迎看看这篇文章

1. 背景
首先感谢地平线工具链用户手册和官方提供的示例,给了我很大的帮助,特别是代码注释写了很多的知识点,超赞!要是注释能再详细点,就是超超赞了!下面开始正文。
最近想着学 QAT(量化感知训练)玩玩,大体看了一下地平线的用户手册,不说精度调优之类比较复杂的,光一个 QAT 上手,就感觉对我这种小白不是很友好,捣鼓了好久,感觉在用户手册中很多基础概念都没写,不同模块之间的关联性也没有详细地介绍,后来发现在用户手册 量化感知训练(QAT) 简介章节 ,有这么一句话:

懂了,没用过 Pytorch 的 QAT,直接看手册学起来有点费劲才是正常滴!
那针对只使用过 Pytorch 在服务器上训练过一些分类、检测模型,没接触过 QAT 的小白,又不想读 PyTorch 官方文档,只想简单入个门,怎么办嘞?欢迎看看这篇文章,提供实操代码和运行步骤,如果文章对你有点作用的话,麻烦收藏+点个赞再走~
该文章参考自 征程6 OE3.0.17中对应的示例以及用户手册
2. 基础理论知识
深度学习量化通常是指以int类型的数据代替浮点float类型的数据进行计算和存储,从而减小模型大小,降低带宽需求,理论上,INT8 量化,与常规的 FP32 模型相比,模型大小减少 4 倍,内存带宽需求减少 4 倍。
量化可以分为 PTQ 与 QAT,
- PTQ:Post-training Quantization,训练后量化,指浮点模型训练完成后,基于一些校准数据,直接通过工具自动进行模型量化的过程,相比 QAT,PTQ 更简单一些,这篇文章不介绍 PTQ。
- QAT:Quantization aware training,量化感知训练,指浮点模型训练完成后,在模型中插入伪量化节点再进行量化训练的过程,大体过程如下图所示,相比 PTQ,QAT 精度更有保障一些,这篇文章介绍 QAT。
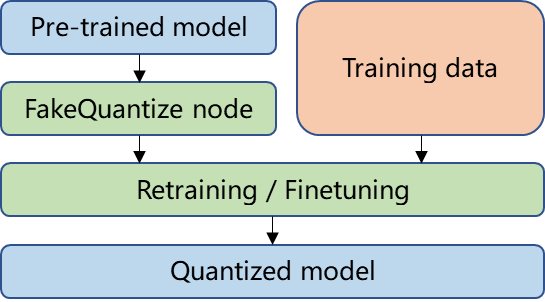
小白:图中伪量化节点 FakeQuantize node 是什么?有什么作用?
大黑:从命名看,就是假装量化呗,模拟将数据从 float 类型量化为 int 类型,主要作用于网络的权重和激活(节点输出,不是 relu 这种激活函数的意思)。在 QAT 中,通过使用伪量化节点,可以在训练期间优化模型以适应后续的真实量化操作,从而提高量化模型的准确性和性能。一旦模型训练完成后,伪量化节点将被替换为真实的量化操作,以生成最终的量化模型。
小白:插入伪量化节点后需要 Retraining/Funetuning?感觉很浪费资源的样子…
大黑:通常再多训 1/10 浮点阶段训练的轮数就好了,比如浮点阶段训练了 100epoch,QAT 训个 10epoch 就好,为了精度,浪费就浪费点,小问题!
小白:从上面这个图看,感觉 QAT 还挺简单的,其实目前我就只会用 pytorch 搭一个卷积网络,然后去训练,那我要经历哪些阶段才能得到最终上板部署的模型呢?
大黑:整个过程会涉及到以下几个模型:
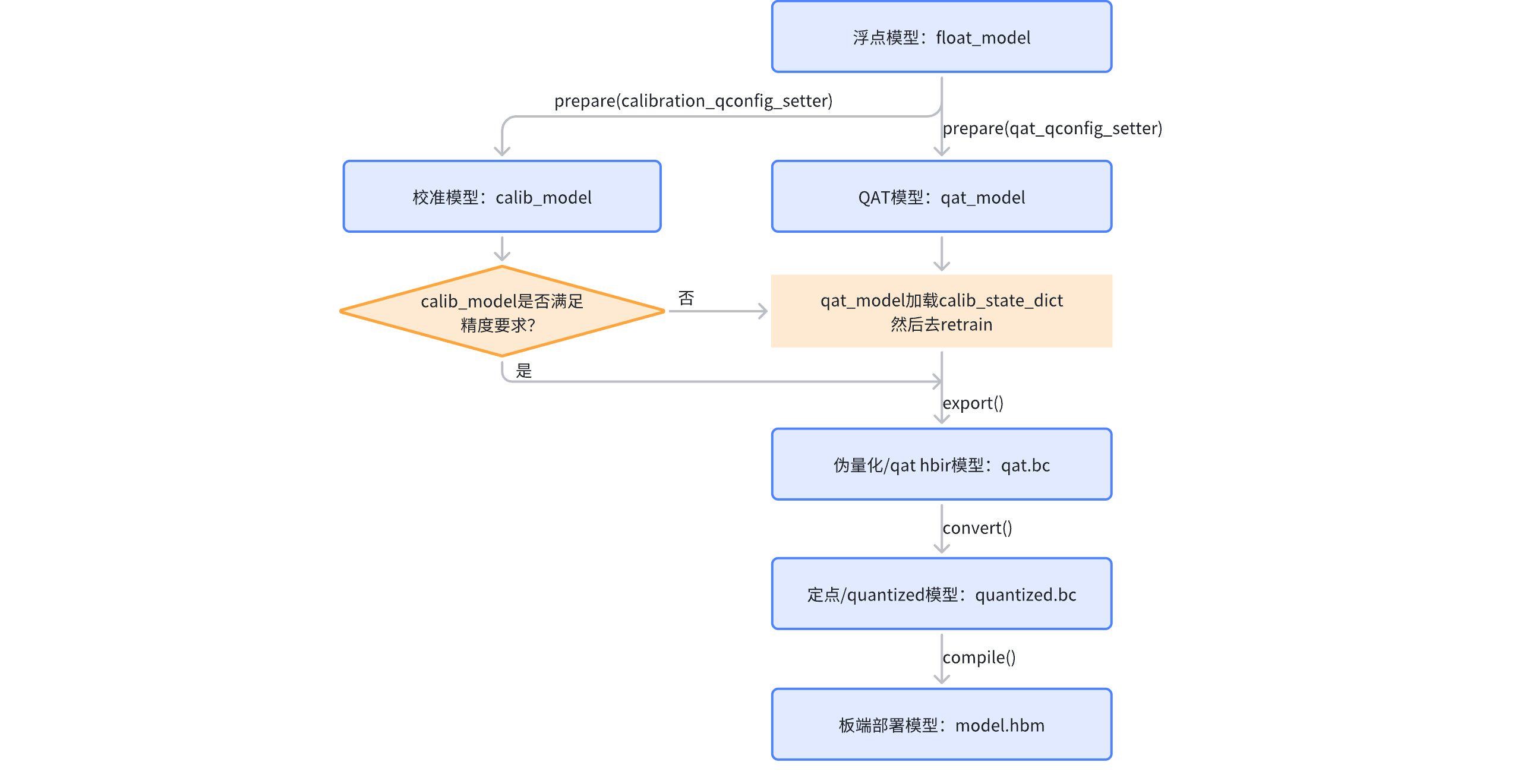
在每个阶段,还有一些需要注意的地方,比如…
小白:停停停,先别急,这里面新名词有点多,先帮我捋捋。float_model 和我直接用 pytorch 搭建的有什么不同吗?calib 是什么?qat_model/qat.bc/quantized.bc 这三者还不是一个意思?板端部署 hbm 模型我知道,就是可以在板子上推理的模型对吧?
大黑:这一连串问题问的挺好,我下面逐个简单解释一下。
- float_model 和我直接用 pytorch 搭建的有什么不同吗?
这里 float_model 浮点模型,其实就是在 pytorch 搭建的常规网络输入位置插入 QuantStub 节点、输出位置插入 DeQuantstub 节点,用于区分量化和不量化的边界。
在 PyTorch 中,QuantStub/DequantStub 是一种用于量化的辅助工具,用于标记量化过程中需要量化/反量化的层或操作,前期浮点训练时可以当它不存在,在定点量化时会自动被替换为对应的量化操作。从普遍而又常规意义上说,想让模型某部分量化,每个输入分支都要插入 QuantStub,每个输出分支都要拆入 DeQuantStub,别再追问为什么了,问就是甲鱼的臀部——“规定”。 - calib 是什么?
calib 是校准 calibration 的缩写,主要作用是确定量化参数,我们知道,合理的初始量化参数能够显著提升模型精度并加快模型的收敛速度。calibration 就是在浮点模型中插入 Observer,使用少量训练数据,在模型 forward 过程中统计各处的数据分布,以确定合理的量化参数的过程。虽然可以不做 Calibration 直接进行 qat 量化训练,但一般来说,校准对量化训练有益无害,所以推荐大家将此步骤作为必选项。 - qat_model/qat.bc/quantized.bc 这三者还不是一个意思?
确实不是一个意思。
qat_model:一种插入了伪量化节点的伪量化模型,还是 torch 模型,简单理解为:qat_model 是为了量化训练而存在的模型,里面还“流淌”着浮点的参数,通过伪量化节点在模拟量化而已。
qat.bc:相比于 qat_model,多了一步查表算子定点化的操作,精度与 qat_model 可能会存在微小的差异。
quantized.bc:模型中浮点算子转换成定点算子,浮点参数全部转换为定点参数,这种转换后的模型称之为 quantized_model /定点模型 / 量化模型。 - 板端部署 hbm 模型我知道,就是可以在板子上推理的模型对吧?
非常对。
小白:这些模型是如何生成的?通过图中那几个函数?是地平线封装好的,直接用?
大黑:是的。
3. 文件准备与程序运行
参考 OE/samples/ai_toolchain/horizon_model_train_sample/plugin_basic 下的示例,主要使用 fx_mode.py 脚本。注意:这儿的 fx_mode 不是传统意义上 pytorch 中量化方式,而是地平线自己开发的 jit-strip 方式,它具有使用简单、debug 方便等优点,对我们基础用户而言,别学太多,all in 就行,反正不会的可以找地平线技术支持。
- 文件目录
(plugin) [xxx plugin_basic]$ tree -L 3
.
├── common.py # 功能代码
├── fx_mode.py # 运行脚本
├── data
│ └── cifar-10-batches-py # cifar10数据集
└── model
└── mobilenetv2
└── mobilenet_v2-b0353104.pth # 预训练权重
代码运行,建议在地平线提供的 docker 里运行,当然,如果大家自己会配置本地环境的话,也可以不用 docker。
- 运行过程
# 通过如下命令,查看一些介绍
python3 fx_mode.py --help
# 生成float-checkpoint.ckpt
python3 fx_mode.py --stage=float
# 生成calib-checkpoint.ckpt
python3 fx_mode.py --stage=calib
# 生成qat-checkpoint.ckpt
python3 fx_mode.py --stage=qat
# 使用定点quantized model evaluate一次
python3 fx_mode.py --stage=int_infer
# 编译生成model.hbm,并对script_model进行可视化
python3 fx_mode.py --stage=compile
运行完全程,所有产出物文件如下图:
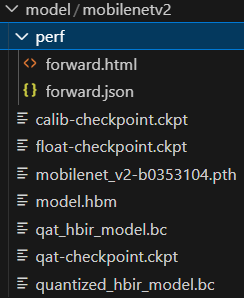
跑起来很简单,下面再和大家一起看看代码层面的情况。
4. 代码详解
该章节参考地平线用户手册以及自己的理解进行介绍,主要是添加了一些中文注释。
4.1 导入必要依赖
之所以写这一节,主要是希望大家可以从注释中,简单了解各个函数的作用,像 torch、os 等对于我而言,特别基础的导入省略没写,全部的依赖可以看提供的代码。其中,horizon_plugin_pytorch 是地平线基于 PyTorch 开发的 的量化训练工具,可以理解成 numpy 这种库,里面有很多用于量化训练的的依赖,我们直接用就好了。
- common.py
# 定义程序需要接收哪些命令行参数,以及这些参数的类型、默认值等信息。
import argparse
# 使用netron可视化qat.bc或quantized.bc
from hbdk4.compiler import visualize
# 从url中下载预训练权重
from torchvision._internally_replaced_utils import load_state_dict_from_url
# 用CIFAR10数据集,简单快速
from torchvision.datasets import CIFAR10
# 模型预训练权重,用于load_state_dict_from_url
from torchvision.models.mobilenetv2 import MobileNet_V2_Weights
# 硬件芯片架构,J6-e:nash-e;J6-m:nash-m
from horizon_plugin_pytorch import get_march
# 用于设置伪量化状态,有FakeQuantState.QAT用于qat model train,FakeQuantState.VALIDATION用于qat/calib model eval,FakeQuantState.CALIBRATION用于 calib
from horizon_plugin_pytorch.quantization import FakeQuantState
# plugin下的hbdk4,用于export qat.bc和推理bc模型
from horizon_plugin_pytorch.quantization import hbdk4 as hb4
# 用于设置qat/calib model 伪量化状态,内参包括FakeQuantState
from horizon_plugin_pytorch.quantization import set_fake_quantize
fx_mode.py
from common import *
# convert:将export之后的qat.bc 转成 quantized.bc
# save:保存qat.bc 或 quantized.bc
from hbdk4.compiler import convert, save
# torch中的一个类,主要用于将量化操作的结果转换回浮点数,也就是对输出数据转换回浮点数
from torch.quantization import DeQuantStub
# 导入MobileNetV2类,用来当父类,目的是构建float_model。
from torchvision.models.mobilenetv2 import MobileNetV2
# 硬件芯片架构,J6-e:nash-e;J6-m:nash-m
from horizon_plugin_pytorch.march import March, set_march
# 类似于torch中的类QuantStub,用于将输入数据量化,使用plugin中的QuantStub是因为它支持通过参数手动固定 scale
from horizon_plugin_pytorch.quantization import QuantStub, prepare
# calib与qat阶段的量化配置
from horizon_plugin_pytorch.quantization.qconfig_template import (
default_calibration_qconfig_setter,
default_qat_qconfig_setter, # calib精度差时,qat使用这个
default_qat_fixed_act_qconfig_setter, # calib精度好时,qat使用这个
)
4.2 主函数
看了第2节理论知识部分,主函数部分的代码就是严格执行那几个阶段 stage(详见第2节),很 easy,关于内部细节,在后面几个小节挨个介绍。
def main(
model: nn.Module,
stage: str,
data_path: str,
model_path: str,
train_batch_size: int,
eval_batch_size: int,
epoch_num: int,
device_id: int = 0,
compile_opt: int = 0,
):
# 对应操作几个阶段的模型
assert stage in ("float", "calib", "qat", "int_infer", "compile", "visualize",)
device = torch.device(
"cuda:{}".format(device_id) if device_id >= 0 else "cpu"
)
if not os.path.exists(model_path):
os.makedirs(model_path, exist_ok=True)
# 浮点训练阶段优化器
def float_optim_config(model: nn.Module):
# This is an example to illustrate the usage of QAT training tool, so
# we do not fine tune the training hyper params to get optimized
# float model accuracy.
optimizer = torch.optim.Adam(model.parameters(), weight_decay=2e-4)
return optimizer, None
# qat训练阶段优化器
def qat_optim_config(model: nn.Module):
# QAT training is targeted at fine tuning model params to match the
# numerical quantization, so the learning rate should not be too large.
optimizer = torch.optim.SGD(
model.parameters(), lr=0.0001, weight_decay=2e-4
)
return optimizer, None
default_epoch_num = {
"float": 20,
"qat": 2, # 通常float训练epoch数量是qat训练epoch数量的10倍
}
if stage in ("float", "qat"):
if epoch_num is None:
epoch_num = default_epoch_num[stage]
train(
model,
data_path,
model_path,
train_batch_size,
eval_batch_size,
epoch_num,
device,
float_optim_config if stage == "float" else qat_optim_config,
stage,
)
elif stage == "calib":
calibrate(
model,
data_path,
model_path,
train_batch_size,
eval_batch_size,
device,
)
elif stage == "int_infer":
int_infer(
model,
data_path,
eval_batch_size,
device,
)
elif stage == "compile":
compile(
model,
model_path,
compile_opt,
)
else:
visualize(model)
if __name__ == "__main__":
# 一些基础参数,详见main、get_model_fx中的操作
args = get_args()
device = torch.device(
"cuda:{}".format(args.device_id) if args.device_id >= 0 else "cpu"
)
model = get_model_fx(args.stage, args.model_path, device)
main(
model,
args.stage,
args.data_path,
args.model_path,
args.train_batch_size,
args.eval_batch_size,
args.epoch_num,
args.device_id,
compile_opt=args.opt,
)
4.3 获取不同阶段模型get_model_fx
Example input
##############################################################################
# Example input for model tracing and hbir exporting.
##############################################################################
example_input = torch.rand(1, 3, 32, 32)
在代码运行时,有个输入参数 stage 必须配置,表示拿到哪个 model 去整后面的事,当 stage 参数传入(“float”, “calib”, “qat”, “int_infer”)中某一个时,会通过如下函数去获取,具体实现过程解读可见代码注释。
# --------------------------------------------------------------------------#
# We define the model convert pipeline to generate model for each stage.
# --------------------------------------------------------------------------#
def get_model_fx(
stage: str,
model_path: str,
device: torch.device,
march=March.NASH_E,
) -> nn.Module:
model_kwargs = dict(num_classes=10, width_mult=1.0)
float_model = FxQATReadyMobileNetV2(**model_kwargs).to(device)
if stage == "float":
# We also could use the origin MobileNetV2 model for float training,
# because modified QAT ready model can load its params seamlessly.
float_model = MobileNetV2(**model_kwargs).to(
device
) # these lines are optional
# Load pretrained model (on ImageNet) to speed up float training.
load_pretrain(float_model, model_path)
return float_model # float的时候,到这儿就退出了
# 浮点训练完成后的权重
float_ckpt_path = os.path.join(model_path, "float-checkpoint.ckpt")
assert os.path.exists(float_ckpt_path)
float_state_dict = torch.load(float_ckpt_path, map_location=device)
# A global march indicating the target hardware version must be setted
# before prepare qat.
set_march(march)
float_model.load_state_dict(float_state_dict)
# We recommand to use the default_xxx_qconfig_setter, it will
# enable high precision output if possible. 尾部conv自动配置高精度int32输出
if stage == "calib":
qconfig_setter = default_calibration_qconfig_setter
else:
qconfig_setter = default_qat_qconfig_setter
# The op fusion is included in `prepare`. 不需要用户自己实现算子融合
qat_calib_model = prepare(
# Catch computation graph of eval mode.
float_model.eval(),
# Must give example input to apply model tracing and do model check.
example_input.to(device),
qconfig_setter, # 重中之重,具体介绍后续看时间
)
# calib stage时,函数到这儿就会返回了
if stage == "calib":
return calib_model
calib_ckpt_path = os.path.join(model_path, "calib-checkpoint.ckpt")
assert os.path.exists(calib_ckpt_path)
calib_state_dict = torch.load(calib_ckpt_path, map_location=device)
if stage == "qat":
if os.path.exists(calib_ckpt_path):
calib_state_dict = torch.load(calib_ckpt_path, map_location=device)
float_state_dict = None # 没太理解为什么这儿要把float_state_dict置为None
else:
calib_state_dict = None
if calib_state_dict is not None:
# qat_model加载的是calib_state_dict!!!
qat_calib_model.load_state_dict(calib_state_dict)
return qat_calib_model # qat阶段到这儿就退出了
# int_infer and compile
qat_ckpt_path = os.path.join(model_path, "qat-checkpoint.ckpt")
# qat_ckpt_path 或 calib_ckpt_path 有一个就行
if os.path.exists(qat_ckpt_path):
qat_calib_model.load_state_dict(
torch.load(qat_ckpt_path, map_location=device)
)
elif os.path.exists(calib_ckpt_path):
qat_calib_model.load_state_dict(
torch.load(calib_ckpt_path, map_location=device)
)
else:
raise FileNotFoundError(
"Do not find saved calib_model or qat_model ckpt "
"to do int inference."
)
qat_ckpt_path = os.path.join(model_path, "qat-checkpoint.ckpt")
assert os.path.exists(qat_ckpt_path)
qat_model.load_state_dict(torch.load(qat_ckpt_path, map_location=device))
# 将 calib/qat_model 模型export导出成伪量化bc、convert转换为定点状态
# If model has multi inputs, pass them as a tuple.
qat_hbir_model = hb4.export(qat_calib_model, example_input.to(device))
quantized_hbir_model = convert(qat_hbir_model, march)
# 保存两个bc文件,可用于后续直接load,也可以提供给地平线技术支持用于分析
save(qat_hbir_model, os.path.join(model_path, "qat_hbir_model.bc"))
save(quantized_hbir_model, os.path.join(model_path, "quantized_hbir_model.bc"))
return quantized_hbir_model # int_infer阶段会到这儿才退出
4.4 构建float_model
从 torchvision.models 中继承 MobileNetV2,微调一下,以支持量化相关操作。模型改造必要的操作有:
- 在模型所有输入分支前插入 QuantStub
- 在模型所有输出分支后插入 DequantStub
这部分具体实现过程解读可见代码注释。
# ----------------------------------------------------------------------------#
# Do necessary modify to the MobilenetV2 model from torchvision.
# For FX mode, we need to:
# Insert QuantStub before first layer and DequantStub after last layer.
# Operation replacement and fusion will be carried out automatically (^_^).
# ----------------------------------------------------------------------------#
# 在PyTorch中,QuantStub/DequantStub 是一种用于量化的辅助工具,
# 用于标记量化过程中需要量化/反量化的层或操作,
# 前期浮点训练时当它不存在,在量化时会自动被替换为对应的量化操作
# ----------------------------------------------------------------------------#
# 从torchvision.models中继承MobileNetV2,微调一下
class FxQATReadyMobileNetV2(MobileNetV2):
def __init__(
self,
num_classes: int = 10, # 实例变量,使用self.来引用变量
width_mult: float = 0.5,
inverted_residual_setting: Optional[List[List[int]]] = None,
round_nearest: int = 8,
):
super().__init__( # 类变量,使用类名来引用变量,如ClassName.variable_name
num_classes, width_mult, inverted_residual_setting, round_nearest
)
# --------------------------------------------------------------------#
# 简单理解,在模型首尾部包一层类似于量化反量化操作,每个输入分支都需要包一下
# --------------------------------------------------------------------#
# 地平线plugin中的QuantStub可以配置scale
# 这里的scale=1/128是后面模型输入配置为pyramid必备的
# pyramid是地平线的芯片上的一个硬件,数据输入可以从这儿来,也可以从DDR来
# --------------------------------------------------------------------#
self.quant = QuantStub(scale=1 / 128)
self.dequant = DeQuantStub()
def forward(self, x: Tensor) -> Tensor:
x = self.quant(x)
x = super().forward(x)
x = self.dequant(x)
return x
关于如何加载预训练权重部分的代码在函数 load_pretrain里,详细内容可以看 Python 文件,这里不再呈现。
def load_pretrain(model: nn.Module, model_path: str):
state_dict = load_state_dict_from_url(
MobileNet_V2_Weights.IMAGENET1K_V1.url,
model_dir=model_path,
progress=True,
) # MobileNet_V2_Weights.IMAGENET1K_V1权重,下载到model_dir,progress是下载进度条显示
4.5 定义常规模型训练与验证的函数
具体实现,看 py 代码就行,很常规。
# --------------------------------------------------------------------------#
# We define dataloaders and other helper functions used in training and evaluation.
# --------------------------------------------------------------------------#
def prepare_data_loaders(
data_path: str, train_batch_size: int, eval_batch_size: int
) -> Tuple[data.DataLoader, data.DataLoader]:
class AverageMeter(object):
"""Computes and stores the average and current value"""
def accuracy(output: Tensor, target: Tensor, topk=(1,)) -> List[Tensor]:
"""Computes the accuracy over the k top predictions for the specified values of k"""
def train_one_epoch(
model: nn.Module,
criterion: Callable,
optimizer: torch.optim.Optimizer,
scheduler: Optional[torch.optim.lr_scheduler._LRScheduler],
data_loader: data.DataLoader,
device: torch.device,
) -> None:
def evaluate(
model: nn.Module, data_loader: data.DataLoader, device: torch.device
) -> Tuple[AverageMeter, AverageMeter]:
4.6 float与qat训练代码解读—float_model/qat_model
针对float_model和qat_model的参数训练,代码解读如下,
# Float and qat share the same training procedure.
def train(
model: nn.Module,
data_path: str,
model_path: str,
train_batch_size: int,
eval_batch_size: int,
epoch_num: int,
device: torch.device,
optim_config: Callable,
stage: str,
):
train_data_loader, eval_data_loader = prepare_data_loaders(
data_path, train_batch_size, eval_batch_size
)
optimizer, scheduler = optim_config(model)
best_acc = 0
for nepoch in range(epoch_num):
# Train/Eval state must be setted correctly before `set_fake_quantize`
model.train()
# --------------------------------------------#
# qat模型训练和普通浮点模型训练的不同之处!
# --------------------------------------------#
if stage == "qat":
set_fake_quantize(model, FakeQuantState.QAT)
train_one_epoch(
model,
nn.CrossEntropyLoss(),
optimizer,
scheduler,
train_data_loader,
device,
)
model.eval()
# --------------------------------------------#
# qat模型验证精度 和普通浮点模型验证精度 的不同之处!
# --------------------------------------------#
if stage == "qat":
set_fake_quantize(model, FakeQuantState.VALIDATION)
top1, top5 = evaluate(
model,
eval_data_loader,
device,
)
print(
"{} Epoch {}: evaluation Acc@1 {:.3f} Acc@5 {:.3f}".format(
stage.capitalize(), nepoch, top1.avg, top5.avg
)
)
if top1.avg > best_acc:
best_acc = top1.avg
torch.save(
model.state_dict(),
os.path.join(model_path, "{}-checkpoint.ckpt".format(stage)),
) # 可用于保存 float-checkpoint.ckpt 和 qat-checkpoint.ckpt
# ----------------------------------------------#
# 当传入epoch_num=0,用于qat eval
# ----------------------------------------------#
if nepoch == 0:
model.eval()
if stage == "qat":
set_fake_quantize(model, FakeQuantState.VALIDATION)
top1, top5 = evaluate(
model,
eval_data_loader,
device,
)
print(
"{} eval only: evaluation Acc@1 {:.3f} Acc@5 {:.3f}".format(
stage.capitalize(), top1.avg, top5.avg
)
) # stage.capitalize()表示将字符串首字母大写
print("Best Acc@1 {:.3f}".format(best_acc))
return model
4.7 模型校的代码解读—calib_model
float 模型训练完成后,需要进行参数校准,得到 calib_model,如果 calib_model 精度满足要求,qat 训练就不需要了,即使 calib_model 精度不行,calib_model_state_dict(校准后的权重)对 qat 训练收敛也非常有帮助。
def calibrate(
calib_model,
data_path,
model_path,
calib_batch_size,
eval_batch_size,
device,
num_examples=float("inf"), # float("inf")表示无穷大,主要用于控制使用多少数据进行校准,默认使用所有数据集
):
# Please note that calibration need the model in eval mode to make BatchNorm act properly.
calib_model.eval() # 即使下面用的是train数据集,这儿也是eval
# set CALIBRATION state will make FakeQuantize in training mode.
set_fake_quantize(calib_model, FakeQuantState.CALIBRATION)
train_data_loader, eval_data_loader = prepare_data_loaders(
data_path, calib_batch_size, eval_batch_size
)
with torch.no_grad():
cnt = 0
for image, target in train_data_loader:
image, target = image.to(device), target.to(device)
calib_model(image)
print(".", end="", flush=True)
cnt += image.size(0)
if cnt >= num_examples: # 主要用于控制使用多少数据进行校准,默认使用所有数据集
break
print()
# Must set eval mode again before validation, because
# set CALIBRATION state will make FakeQuantize in training mode.
calib_model.eval()
set_fake_quantize(calib_model, FakeQuantState.VALIDATION)
top1, top5 = evaluate(
calib_model,
eval_data_loader,
device,
)
print(
"Calibration: evaluation Acc@1 {:.3f} Acc@5 {:.3f}".format(
top1.avg, top5.avg
)
)
torch.save(
calib_model.state_dict(),
os.path.join(model_path, "calib-checkpoint.ckpt"),
)
return calib_model
4.8 定点模型评测精度 代码解读—quantized_model
定点模型/quantized 模型/量化模型 eval 推理一下看看精度
def int_infer(
quantized_model,
data_path,
eval_batch_size,
device,
):
# hbir do not support dynamic batch size or cuda
eval_batch_size = 1
device = torch.device("cpu")
quantized_model = HbirModule(quantized_model)
_, eval_data_loader = prepare_data_loaders(
data_path, eval_batch_size, eval_batch_size
)
top1, top5 = evaluate(
quantized_model,
eval_data_loader,
device,
)
print(
"Quantized: evaluation Acc@1 {:.3f} Acc@5 {:.3f}".format(
top1.avg, top5.avg
)
)
return quantized_model
bc/hbir 模型如何推理呢?使用 HbirModule 即可
##############################################################################
# Hbir module wrapper to deal with in-out structures.
##############################################################################
class HbirModule(nn.Module):
def __init__(self, hbir_module) -> None:
super().__init__()
self.hbir_module = hbir_module
self.input_flattener = hb4.get_hbir_input_flattener(hbir_module)
self.output_unflattener = hb4.get_hbir_output_unflattener(hbir_module)
# hbir do not support dynamic batch size or cuda
def forward(self, input): # 输入给tuple即可
flat_input = self.input_flattener(input)
hbir_rets = self.hbir_module[0](*flat_input)
rets = self.output_unflattener(hbir_rets)
return rets
4.9 编译生成上板模型—model.hbm
编译生成上板模型 model.hbm,同时针对 hbm 模型预估性能
def compile(
quantized_model,
model_path,
compile_opt=0,
):
from hbdk4.compiler import compile, hbm_perf
hbm_path = os.path.join(model_path, "model.hbm")
perf_dir = os.path.join(model_path, "perf")
compile(quantized_model, hbm_path, get_march(), compile_opt) # 编译生成hbm模型
hbm_perf(hbm_path, perf_dir) # 预估hbm模型性能
5. 后续计划
之前写过一篇 X征程3/征程5 零基础学习地平线 QAT 量化感知训练,在 CSDN 上的反馈还行,为了方便直接入手 征程6 的用户,特意写了这篇文章。关于后续,应该会基于 征程6 再学习一些工具链的知识,例如:
-
prepare 阶段的 qconfig_setter 是重中之重,本文并未介绍,后续再看
-
这个模型比较简单,针对 forward 中有动态循环的怎么处理?不需要处理?后续再看
t)
rets = self.output_unflattener(hbir_rets)return rets
## 4.9 编译生成上板模型—model.hbm
编译生成上板模型 model.hbm,同时针对 hbm 模型预估性能
def compile(
quantized_model,
model_path,
compile_opt=0,
):
from hbdk4.compiler import compile, hbm_perf
hbm_path = os.path.join(model_path, "model.hbm")
perf_dir = os.path.join(model_path, "perf")
compile(quantized_model, hbm_path, get_march(), compile_opt) # 编译生成hbm模型
hbm_perf(hbm_path, perf_dir) # 预估hbm模型性能
## 5. 后续计划
之前写过一篇 X征程3/征程5 零基础学习地平线 QAT 量化感知训练,在 CSDN 上的反馈还行,为了方便直接入手 征程6 的用户,特意写了这篇文章。关于后续,应该会基于 征程6 再学习一些工具链的知识,例如:
- prepare 阶段的 qconfig_setter 是重中之重,本文并未介绍,后续再看
- 这个模型比较简单,针对 forward 中有动态循环的怎么处理?不需要处理?后续再看
- 精度调优过程是什么?精度调优工具怎么用?后续再看

加入社区
更多推荐



 30
30 0
0- 0


 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)