3D Semantic Segmentation in the Wild: Learning Generalized Models for Adverse-Condition Point Clouds
论文中提出了,一个专门为研究在下进行而设计的数据集。该数据集包含了密集的点级注释,所有数据都来自条件(包括浓雾、轻雾、降雪和降雨)。这一数据集的特点是填补了现有3D分割模型的一个空白,因为大部分现有模型训练时使用的点云数据来自正常天气条件。本研究是首次探索 3DSS的尝试。利用SemanticSTF 数据集使正常到恶劣环境的成为可能。自动驾驶系统高度依赖点云来进行环境感知,这些点云通常是在不同的天
3D Semantic Segmentation in the Wild: Learning Generalized Models for Adverse-Condition Point Clouds
3D Semantic Segmentation in the Wild:学习对恶劣天气点云的通用模型
提出新数据集: 论文中提出了 SemanticSTF,一个专门为研究在恶劣天气条件下进行3D语义分割而设计的数据集。该数据集包含了密集的点级注释,所有数据都来自不同的天气条件(包括浓雾、轻雾、降雪和降雨)。这一数据集的特点是填补了现有3D分割模型的一个空白,因为大部分现有模型训练时使用的点云数据来自正常天气条件。
本研究是首次探索 3DSS 域泛化的尝试。
利用SemanticSTF 数据集使正常到恶劣环境的无监督域适应成为可能。
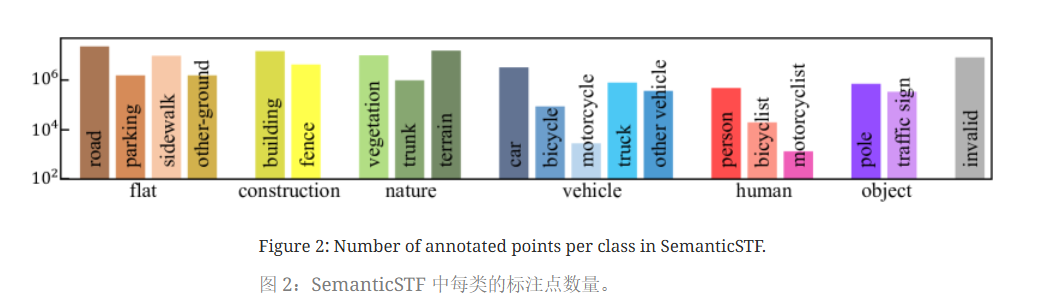
- 数据集特点:
- 恶劣天气条件:包括雾霾、雪天和雨天,数据集中的点云能够覆盖这些极端天气的环境。
- 点云密度和注释:提供了高密度的点云数据和点级标签(20+1ignore),这对于训练高精度的3D分割模型至关重要。
- 从 STF 中选择了由 Velodyne HDL64 S3D 捕获的 2076 个scan,涵盖了包括 694 个雪天、637 个浓雾天、631 个轻雾天和 114 个雨天(STF 中所有的雨天扫描)在内的各种恶劣天气条件。在选择中注意点云地理多样性,最大限度减少数据冗余,忽略白天/夜晚。
- 将 SemanticSTF 分三部分,包括 1326 训练,250 验证,500 测试(不同天气扫描比例大致相同)
恶劣天气条件下的挑战: 自动驾驶系统高度依赖点云来进行环境感知,这些点云通常是在不同的天气条件下获取的。然而,现有的3D语义分割模型大多是在正常天气条件下进行训练的,这使得它们在恶劣天气下的表现不尽如人意。论文旨在通过探索领域自适应和领域泛化的策略,使模型能够更好地适应各种天气变化。
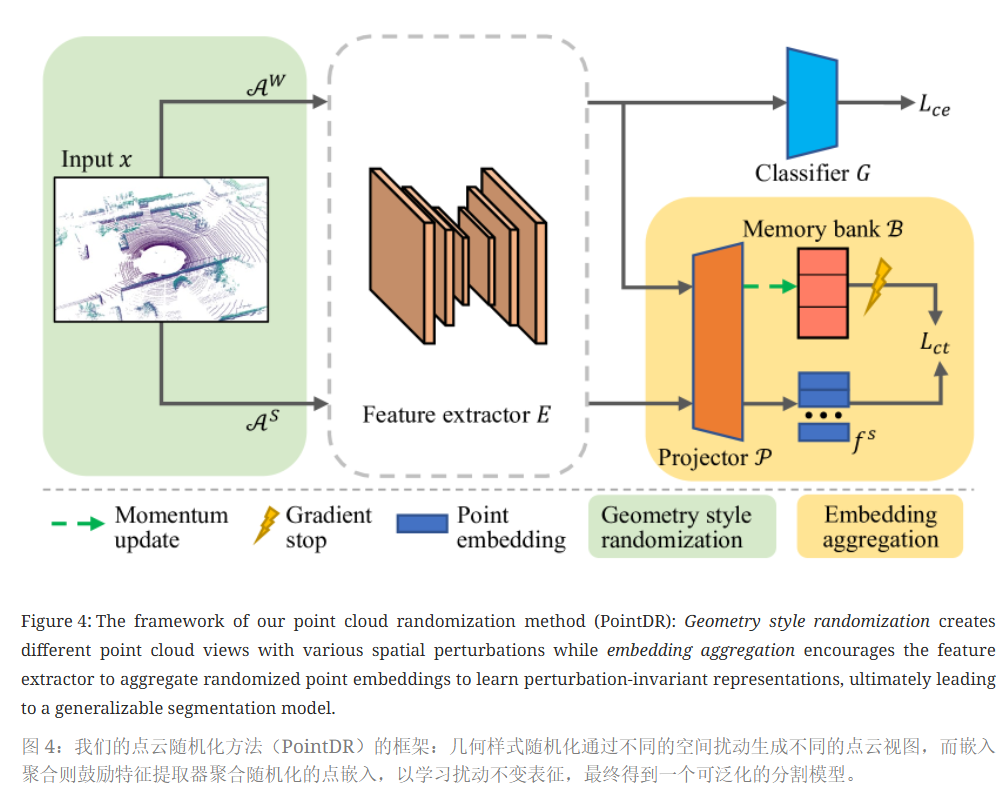
PointDR框架:作者设计了PointDR,这是一个新的基线框架,用于未来在各种天气条件下3DSS的研究和基准测试。PointDR通过几何样式随机化和嵌入聚合两种迭代操作来解决稀疏、不完整和几何变化大的点云数据问题,以及恶劣天气条件下引入的噪声问题。
- 几何样式随机化旨在丰富几何样式并扩展训练点云数据的分布。弱视图 A W ( x ) A^W(x) AW(x) 采用简单的随机旋转和随机缩放;**强视图 ** A S ( x ) A^S(x) AS(x) 在 A W ( x ) A^W(x) AW(x) 我们在的基础上进一步采用随机丢弃、随机翻转、随机噪声扰动和随机抖动。
- 嵌入聚合旨在聚合随机点云的编码嵌入,以学习域不变表示。通过E和P得到标准化的点特征嵌入 f = P ( E ( x ) ) f=P(E(x)) f=P(E(x)).再通过对一个batch内的 f w f^w fw 进行类别平均,存储在记忆库B(无反向传播)中,并通过迭代动量更新。最后将每个点特征嵌入 f i s f^s_{i} fis 作为query,将B中的特征嵌入作为对比学习的key, 其中与查询具有相同语义类别的键是正键ℬ+,其余为负键。对比损失定义为:
- 对比学习使同类点的特征嵌入更紧密,同时使不同类点的特征嵌入相互远离。优化所提出的对比损失将聚合随机点云特征,并学习扰动不变表示,最终得到一个鲁棒性强且可泛化的分割模型。动量更新的记忆库为每个语义类提供了特征原型,从而能够进行更鲁棒和稳定的对比学习。

| 方法 | 目标 | 依赖的数据类型 | 挑战 |
|---|---|---|---|
| 领域自适应3DSS | 将在正常天气下训练的模型迁移到恶劣天气数据中 | 需要目标领域的标注数据 | 需要大量标注数据;源领域与目标领域之间的分布差异 |
| 领域泛化3DSS | 训练一个跨多个领域通用的模型 | 不需要目标领域的标注数据 | 学习到的特征要具有领域无关性;如何平衡模型的泛化能力 |
两种主要方法:
领域泛化3D语义分割(Domain Generalizable 3DSS) 这一方法的目标是创建能够在不同领域(不同天气条件下)表现出色的模型,而不需要针对特定条件进行微调。
领域泛化方法的目标是训练一个通用的3D语义分割模型,使其能够跨越不同的领域(包括不同的天气条件),而无需针对每个特定的领域进行重新训练或微调。
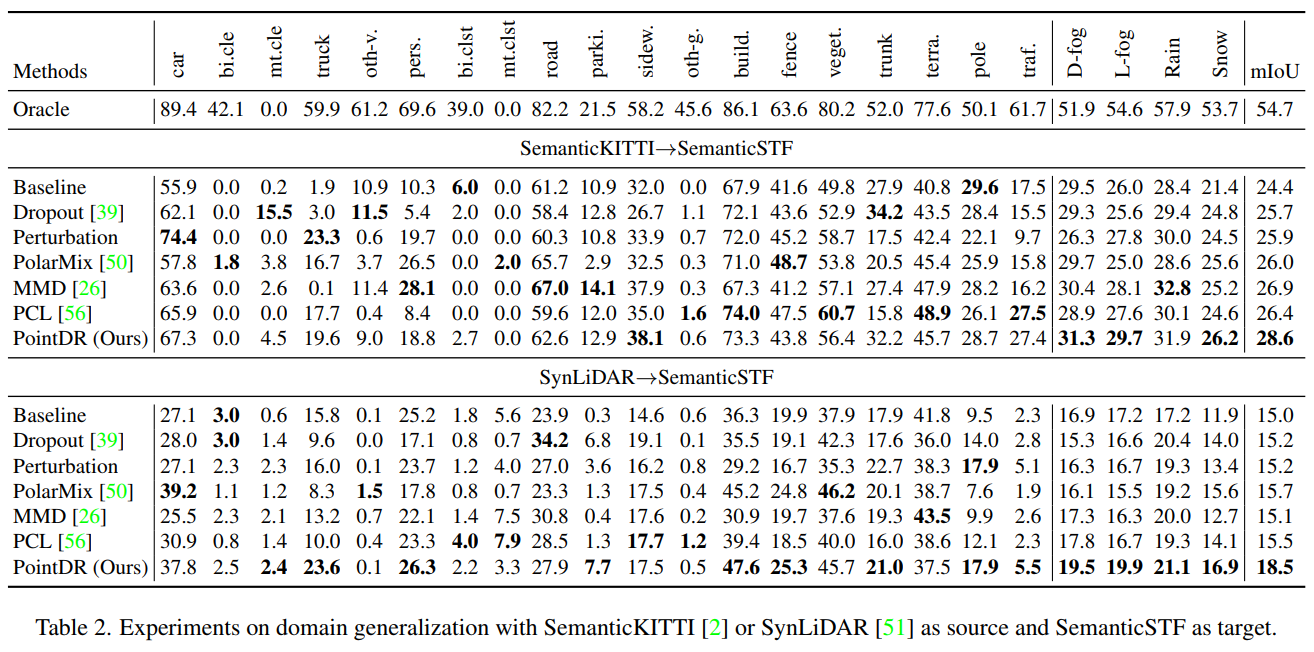
两个基准,SemanticKITTI → SemanticSTF 和 SynLiDAR → SemanticSTF。基准测试中使用MinkowskiNet作为主干模型。
使用两种方法作为基线方法进行对比,所提出的 PointDR 在两个基准测试上均实现了最佳的泛化能力,证明了其学习扰动不变点云表示以及处理全天气 3DSS 任务时的有效性和卓越能力。
-
数据增强(仅适用雨天和雪天)
- Dropout:随机丢弃点以模拟恶劣天气下激光雷达点的缺失
- 噪声扰动:在三维空间中添加随机点以模拟由落雪等粒子引入的噪声点
- PolarMix:混合不同来源的点云以增强效果
-
将二维域泛化方法应用于三维单扫描场景语义分割
- MMD最小化最大平均差异:Domain generalization with adversarial feature learning(浓雾和雨天)
- PCL:Proxy-based contrastive learning for domain generalization(雨天和雪天)
领域自适应3D语义分割(Domain Adaptive 3DSS) 这一方法的重点是将训练好的3D语义分割模型(基于正常天气数据)自适应到恶劣天气数据上。
主要思路:
领域自适应方法的目标是将一个在正常天气数据上训练的3D语义分割模型,调整或迁移到在恶劣天气条件下(如雾霾、雪天、雨天)表现更好的模型。
基准SemanticKITTI → SemanticSTF,基准测试中使用MinkowskiNet作为主干模型。
选择四种无监督域适应UDA方法
- ADDA
- 熵最小化Ent-Min
- 自训练
- CoSMix
在正常到恶劣的适应设置下,所有 UDA 方法的表现均始终优于仅源模型。然而,另一方面,性能提升仍然相当有限,这表明在正常到恶劣天气条件下的域自适应三维语义场景分割(3DSS)方面仍有很大的改进空间。
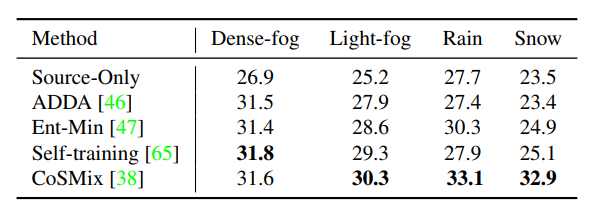
在浓雾和轻雾条件下,四种方法的表现均优于仅源方法,证明了它们在缓解域差异方面的有效性。然而,在雨雪条件下,仅有 CoSMix 取得了微小的性能提升,而其他三种 UDA 方法的性能提升有限。
- 雨雪会在物体表面造成较大形变或产生大量噪声,使得从正常天气到恶劣天气的适应更具挑战性。CoSMix 在输入空间中通过直接混合源点和目标点来工作,从而在降雪和降雨较大、域差距较大的情况下表现更佳。
两者关系:
- 领域自适应方法依赖于目标领域的数据,而领域泛化则力求在没有目标领域标注数据的情况下进行训练,目标是通过特征学习使得模型跨领域泛化。
- 如果领域自适应方法成功,可能会显著提高在特定领域(如恶劣天气)的性能;而领域泛化方法则旨在从根本上提高模型的通用性,使其适应更多种类的环境变化。

加入社区
更多推荐



 30
30 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)