
征程 6 VIO Frame 时间戳介绍
本文详细介绍了征程 6 VIO Frame 时间戳
·
1. 时间类型
征程 6 内部的时间类型如下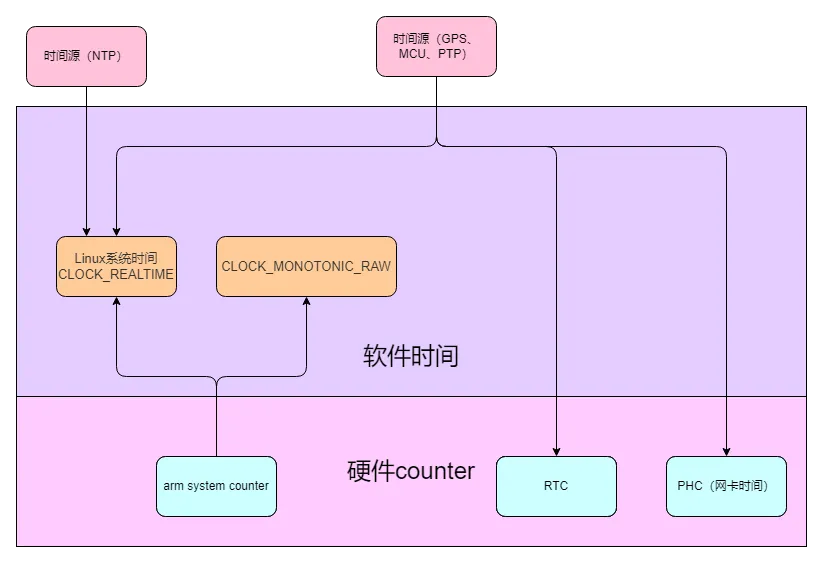
Linux 系统时间是基于 arm system counter 抽象的,Linux 的基于 arm system counter 抽象了很多种时间,图中画了两种。CLOCK_MONOTONIC_RAW 是不会被时间同步调整的。
2. Frame 时间戳
从 VIO 侧获取的图像数据,带有时间戳信息,相关信息如下:
typedef struct image_info_s {
uint16_t sensor_id; /
< sensor id */
** uint32_t pipeline_id; /**
< pipeline id */
uint32_t frame_id; /
< frame id */
** uint64_t time_stamp; /**
< HW time stamp */
struct timeval tv; /
< system time of hal get buf */
** int32_t buf_index; /**
< buffer index */
int32_t img_format; /
< image format */
** int32_t fd[HB_VIO_BUFFER_MAX_PLANES]; /**
< ion buf fd */
uint32_t size[HB_VIO_BUFFER_MAX_PLANES]; /
< buffer size per plane */
** uint32_t planeCount; /**
< image plane count */
uint32_t dynamic_flag; /
< dynamic flag */
** uint32_t water_mark_line; /**
< water mark line value */
VIO_DATA_TYPE_E data_type; /
< buffer data type */
** buffer_state_e state; /**
< buffer state */
uint64_t desc; /
< temp description for isp raw feedback */
** struct timeval trig_tv;/**
< system time of lpwm trigger */
} image_info_t;
time_stamp:代表收到第一行到达时刻,获取的是 system count;
struct timeval tv: 代表收到第一行到达时刻,时间戳来源有 3 个地方, 分别代表 RTC 时戳,wall time,PHC 时戳,可通过/sys/devices/platform/soc/soc:globaltime/globaltime 配置;
struct timeval trig_tv: 同 tv,代表 LPWM trigger 时刻;
| 类型 | value | 获取方式 | 是否受授时影响 |
|---|---|---|---|
| GLOBAL_TIME_RTC | 2 | 硬件寄存器锁存 | Y |
| GLOBAL_TIME_PHC | 1 | 依赖 FS ISR 软件获取 | Y |
| GLOBAL_TIME_SYSTIME | 0 | 依赖 FS ISR 软件获取 | N |
- RTC、PHC 是可以被时间同步调整的,直接调整的是硬件 counter。
○ PHC 时间获取:驱动调用 hobot_eth_get_phc_time 接口
○ RTC 时间获取:CIM 可以通过读寄存器直接拿到 RTC 时间,不建议调用接口获取 RTC 时间
■ RTC 精确到秒的时间:应用层可以获取
■ RTC 精确到纳秒的时间:
□ 如果时间同步在同步 RTC,不允许其他应用获取 RTC 时间,因为获取 RTC 时间可能 导致 RTC 时间异常改变,这个是硬件限制。
□ 如果不做 RTC 的时间同步,应用层可以获取 RTC 时间
常改变,这个是硬件限制。
□ 如果不做 RTC 的时间同步,应用层可以获取 RTC 时间
- 车载系统一般使用 PHC 时间域,所以 frame timestamps 选择 PHC 时钟源的情况偏多,当前具体使用哪个时钟源,看具体方案;

加入社区
更多推荐



 3
3 0
0- 0


 已为社区贡献71条内容
已为社区贡献71条内容

所有评论(0)